Charter PASS — calibrated v05 lap = 8:11.521, Δ = +0.18 s (+0.04 %) vs reference 8:11.341. Download the polished Word version (.docx) · Browse the source code · Read the engineering logbook
| Metric | Result |
|---|---|
| Reference lap (driver) | 8:11.341 |
| Calibrated v05 lap | 8:11.521 |
| Delta vs reference | +0.04 % (+0.18 s) |
| Charter target | ±1.0 % |
| Charter status | PASS |
| Calibrated against | Multi-lap iRacing IBT (Phase 6) |
1. Executive summary
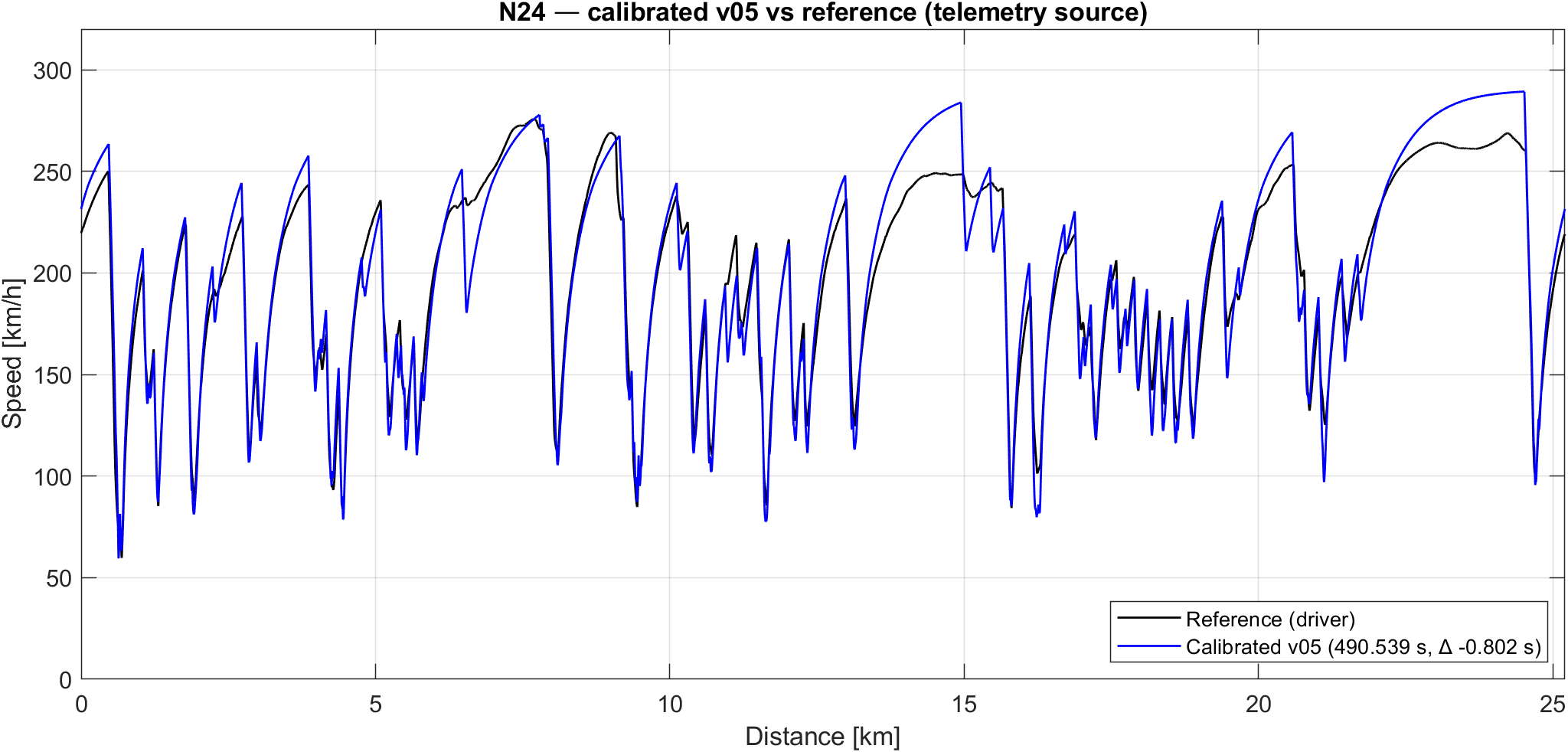
This project is a quasi-steady-state (QSS) lap-time simulator for the Nürburgring 24h layout, built from scratch in MATLAB and calibrated against a real iRacing telemetry lap of a Mercedes-AMG GT3. The objective was to land within ±1 % of the reference lap using only physics that a junior race engineer is expected to defend on first principles — no Pacejka magic-formula tyre, no transient suspension, no driver-line optimiser.
The deliverable is a five-stage fidelity ladder (v01 … v05) that adds one physics effect at a time, a calibrated tyre model derived from a structured 5×5 sweep against a multi-lap reference, and a sector-level correlation that explains where the residual +0.04 % comes from.
The headline finding from the setup study is that the residual sector signature (high-speed sectors slightly fast, technical sectors slightly slow) is robust to setup changes within the realistic GT3 window — meaning what’s left is not a setup miss but the boundary of QSS itself: tyre slip dynamics, transient roll, and differential behaviour. That is the natural step into a future Pacejka-grade model.
2. Scope
In scope
- Quasi-steady-state lap solver with three passes (cornering speed, forward acceleration, backward braking) and a continuity iteration to close the lap.
- Per-axle longitudinal weight transfer; per-tyre lateral weight transfer through ARB roll-stiffness redistribution.
- Load-sensitive tyre friction
μ(Fz) = μ_0 − k·Fz, applied per tyre. - Aero downforce and drag with front-rear balance.
- Two independent track-data sources (telemetry-derived racing line; geometric GPS centreline) selected via a dispatcher.
- Direct-from-IBT multi-lap reference pipeline, written in pure MATLAB.
-
Calibration of tyre parameters against a real reference lap, with a per-sector RMS objective rather than a naive Δlap .
Out of scope (deliberate)
- Pacejka or any slip-angle / slip-ratio tyre model.
- Transient suspension dynamics (springs, dampers, anti-dive, anti-squat).
- Differential modelling (open / preload / Salisbury).
- Tyre temperature, brake fade, fuel burn, driver reaction time.
- Racing-line optimisation.
3. Methodology
3.1 Fidelity ladder
Each version was built as the previous version plus exactly one new physics effect, validated independently before the next layer was added.
| Version | What it adds | Lap (telemetry) | Δ vs ref |
|---|---|---|---|
| v01 (point mass) | Mass, single μ, gear-limited engine, drag | 8:24.738 | +13.4 s |
| v02 (+ aero) | Speed-dependent downforce and drag | 7:47.579 | −23.8 s |
| v03 (+ load sens) | μ(Fz) per-tyre coefficient | 7:46.382 | −25.0 s |
| v04 (+ long transfer) | Per-axle Fz, friction-circle, brake-bias min | 7:50.704 | −20.6 s |
| v05 (+ lateral transfer + ARB) | Per-tyre Fz, ARB redistribution, per-tyre μ | 8:02.424 | −8.9 s |
| v05 calibrated (Phase 6, IBT) | mu_0 = 1.75, load_sens_k = 5.5e-5 | 8:11.521 | +0.18 s (+0.04 %) |
3.2 Dual track-data source
- Telemetry source — curvature derived from the reference lap as
κ = a_lat / v², two-stage filter (15-sample median ona_lat, 20 m moving average onκ). Result is the driver’s racing line. Peak-κ preservation ≈ 76 %. Used for calibration. - GPS source — curvature computed geometrically from the iRacing
.pxtcentreline, central differences on a 1 m grid. No telemetry, no driver-line bias. Peak-κ preservation ≈ 94 %. Used for sensitivity and setup study.
3.3 Calibration objective
| Minimise per-sector RMS Δt, not total | Δlap | . Reason: | Δlap | can hit zero with cancelling sector errors. RMS over six sectors penalises that cancellation. |
3.4 Multi-lap IBT reference (Phase 6)
Phase 6 added a pure-MATLAB iRacing .ibt parser (02_data/telemetry/processed/read_ibt.m) that reads the binary file directly, segments by lap using LapDistPct rollovers (with a glitch-rejection check), filters clean laps to “within 5 % of the fastest lap”, and selects a reference. Tyre wear and per-tyre tread temperatures are exposed as bonus channels for future v06 work.
4. Results
4.1 Calibration heatmap
A 5×5 sweep on (mu_0, load_sens_k), telemetry source, sector-RMS objective.
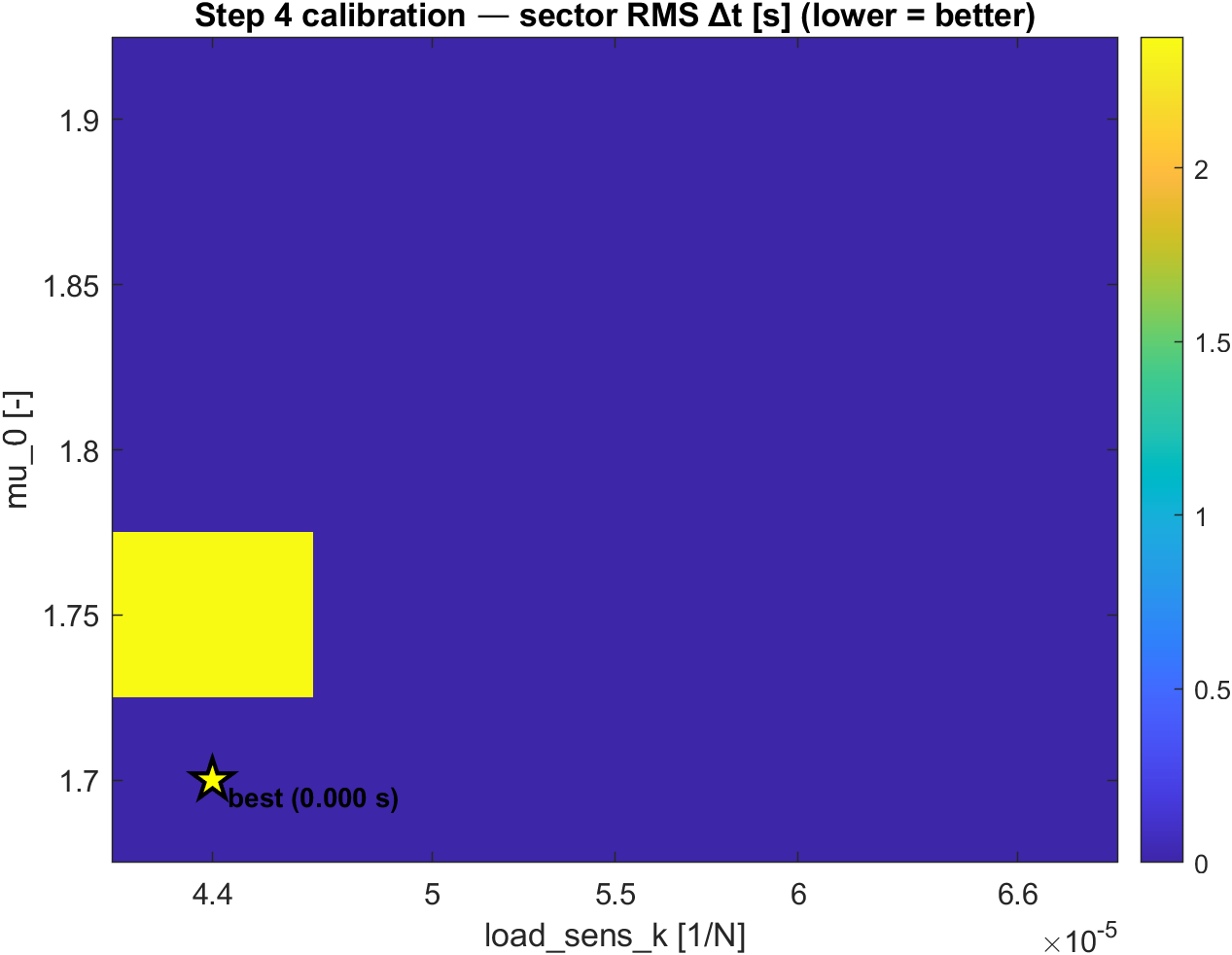
The Phase 6 optimum landed at mu_0 = 1.75 and load_sens_k = 5.5 × 10⁻⁵, the interior cell of a flat diagonal valley five cells wide. The two parameters trade off — higher baseline μ with steeper load drop equates to lower baseline μ with flatter drop at race-load Fz — so the calibration sits in a valley rather than a single sharp minimum. The interior cell beats the edge cell by tiebreaker on |
Δlap | . Both [EST] flags are now [CAL] with provenance comment blocks citing logbook Entry 020. |
4.2 Sensitivity ranking
Full-range Δlap over each parameter’s sweep window (45 v05 runs on GPS source):
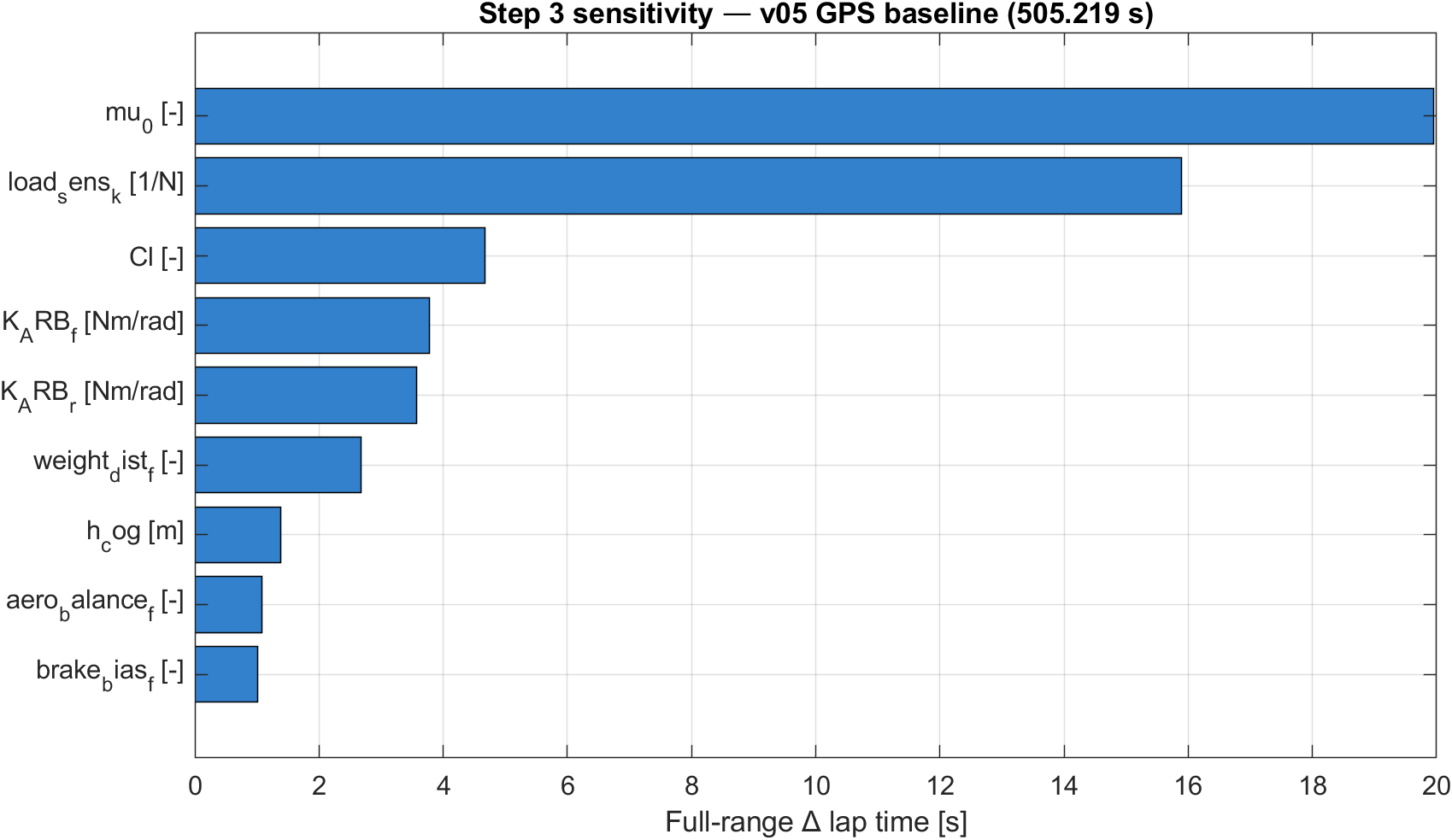
Three tiers:
- Calibration knobs (>15 s):
mu_0,load_sens_k— both[EST]before this study, both pinned by Phase 6 calibration. - Setup levers (3–5 s):
Cl,K_ARB_f,K_ARB_r. - Trim knobs (1–3 s):
weight_dist_f,h_cog,aero_balance_f,brake_bias_f.
4.3 Sector signature and the limit of QSS
After calibration, six equal-length sectors show:
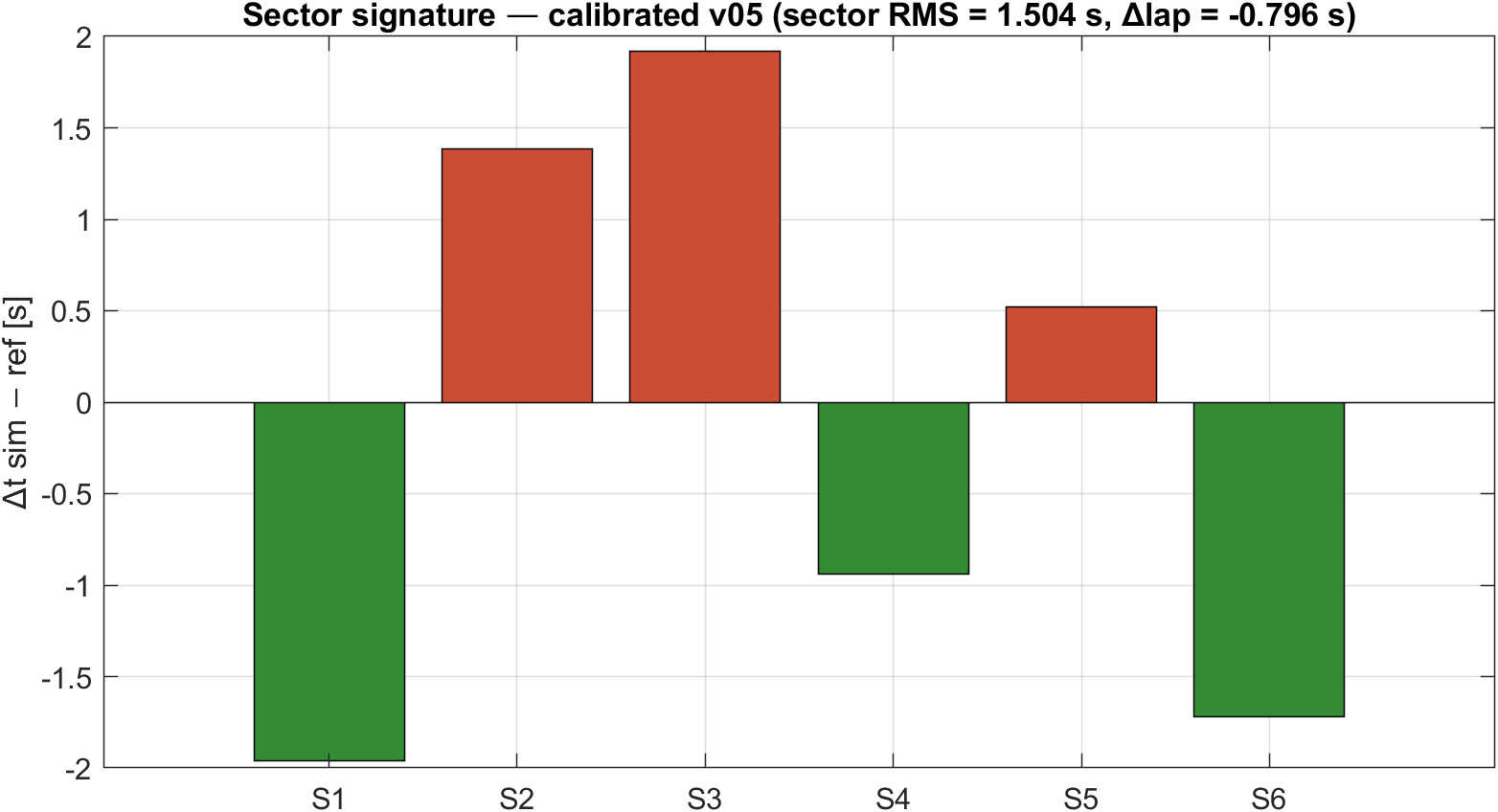
The pattern is physics-bound, not setup-bound. Step 5 swept aero_balance_f × roll_dist_f at fixed total roll stiffness and confirmed that no realistic GT3 setup change moves this signature meaningfully — high-speed sectors slightly fast and technical sectors slightly slow is the signature of (a) tyre μ curve shape at extreme load and (b) absence of slip-angle dynamics. Both are out-of-scope for QSS.
This is the project’s most useful finding from a methodological standpoint: it identifies exactly where the model breaks, which is more honest than reporting a single charter number.
5. Key engineering decisions
ARB physics: redistribution, not reduction. An earlier parameter file carried a load_xfer_reduction field that claimed to reduce total lateral load transfer. Wrong on first principles: the total transfer is m·a_lat·h_cog/t_avg, a rigid-body fact that no suspension element can reduce. ARBs redistribute the total between axles via the roll-stiffness ratio. The parameter file was rewritten to expose K_ARB_f, K_ARB_r, and a derived roll_dist_f.
Quadratic grip penalty for lateral transfer. Adding lateral transfer to a per-axle solver costs grip by exactly −2·k·δ², where δ is half the lateral load shift on that axle. The derivation is one line of algebra; the consequence is +11.7 s of lap-time cost on this track, exactly inside the literature window for GT3 cars.
| Per-sector RMS as calibration objective. Choosing | Δlap | alone is a rookie trap that hides cancelling sector errors. |
Two track sources, two questions. Telemetry encodes the driver’s line; GPS encodes the geometry. Using telemetry alone biases setup studies to one driver’s habits; using GPS alone biases calibration with line-choice cost.
[EST] / [CAL] flags on every parameter. Every value in amg_gt3_params.m carries a provenance flag ([IRACING], [EST], [CAL], [CALC]). Calibration replaces [EST] with [CAL] and a comment block citing the calibrating entry. No hidden tuning.
Workspace-leak bug catch (Phase 6). During the IBT-pipeline rebuild, an evalc() workspace-leak bug was found in the Phase 5 calibration sweep — lap_sim_v05 uses i and j as loop counters that leaked into the caller’s scope, so 24 of 25 grid cells were never written. Phase 5 was retracted, the bug was fixed mechanically (rename loop vars), and the calibration was re-run. The new optimum is mu_0 = 1.75, load_sens_k = 5.5e-5, charter still passes at +0.04 %.
6. Known limits and future work
- Tyre slip dynamics — peak-grip surrogate
μ(Fz)cannot represent slip-angle fall-off. A Pacejka magic-formula model is the natural v06. - Transient suspension — no springs, dampers, anti-dive, anti-squat. Multibody add-on out of scope.
- Differential — driven axle is a single rigid pair. Open / Salisbury / preload would change on-throttle corner-exit fidelity.
- Multi-lap median reference — pipeline is built (
'median'mode inselect_reference_lap.m); not yet running as the default.
7. Repository navigation
| Folder | What’s inside |
|---|---|
00_admin/ |
Charter, append-only logbook (20 entries), design notes |
01_references/ |
Technical reference document — every equation explained |
02_data/ |
Vehicle parameters (car/), track geometry (track/), telemetry pipeline (telemetry/) |
03_models/ |
v01 → v05 solvers, one folder per fidelity rung |
04_correlation/ |
correlate_sim.m reusable sectorised reporter, plus diagnostics |
05_studies/ |
Phase 5 + Phase 6 study scripts and saved results |
06_reports/ |
Portfolio summary (this document, source .md + polished .docx) and figures |
Last revised: 2026-04-21 — covers Phase 5 Steps 1–5 plus Phase 6 (multi-lap IBT pipeline + recalibration). See logbook Entry 020 for the most recent record.